- NI美国国家仪器,Labview软件 | 咨询电话:189-2876-4315 |
浙大机器人BICS
案例详情
概述
用户介绍
浙江大学(Zhejiang University)是中国人自己最早创办的新式高等学校之一1928 年更名为国立浙江大学。中华民国
时期,浙江大学在竺可桢老校长的带领下,崛起为民国最高学府之一,被英国科学史家李约瑟誉为“东方剑桥”,浙江大学直属于中华人民共和国教育部,是中国著名顶级学府之一,是中国“学科最齐全”、“学生创业率最高”的大学,是首批 7 所“211 工程”、首批 9所“985 工程”重点建设的全国重点大学之一,是九校联盟、世界大学联盟、环太平洋大学联盟的成员,入选“珠峰计划”、“2011 计划”、“111 计划”重点高校。
挑战
四足机器人的环境适应性强,可以灵活应对各种轮式机器人无法适应的复杂路面环境,对于复杂地形环境中的各类作业任务有着广阔的应用前景。而快速灵活的机器人运动控制可以进一步增强四足机器人作业能力。因此,衡量一台优秀的四足机器人,最为突出的两个要素是:基于未知复杂路面的通过能力和快速跑跳能力。为实现这两个能力,控制系统和上位机首先要解决以下主要技术难题:1,多关节高速实时运动控制技术。2,面向多种工业传感器的通信接口。3,对于复杂信息的强大数据处 理能力和精确定时技术。4,对于上位机数据的图形化显示界面。
解决思路
面对复杂的系统的具体需求,项目最后基于 NI 快速开发原型平台 CompactRIO下设计了一套集调试、监控、采集、计算、控制、通讯的机器人运动系统。机器人的工控机采用 CompactRIO-9033,其有丰富的 I/O 和通讯接口资源,基于实时高效的系统架构和操作系统,团队能够快速开发出高性能的、稳定的、界面友好的四足机器人控制系统。同时得益于 NI 强大的技术支持和专家知识库,以及 CompactRIO 灵活的模块化配置方式,让我们团队能在不同的设计方案中实践改良,最终 6 个月完成一期项目。
实现
基于四个方向的挑战,团队经过 6 个月的研究与设计,系统性的提出了整体解决方案,赤兔机器人共有 12 个关节,控制系统需要实时接收 12 个关节驱动器反馈上来的角度、角速度和电流等数据,项目组建立了基于EtherCat 通讯协议的多驱动器实时通讯系统,为了更好的捕获未知路面的信息,机器人通过 IMU 获得身体的姿态和运动信息、通过压力传感器将足部与地面的接触状态,和通过 GPS 获得的外场信息上传,cRIO9033 作为主控单元,基于EtherCAT,RS485,RS232,USB,网口等多协议协同配合,完成了机器人系统的搭建,在一套控制平台当中完成了复杂系统的整合。同时面向强大的数据处理需求,cRIO 实时层完成运动控制需求,基于 FPGA硬件处理路径规划,在界面处理当中使用丰富的图形化编程语言完成上位机的软件。
结果
基于 NI 快速原型验证平台 cRIO 与LabVIEW,团队以与六个月完成一期项目,同时获得 student design 全球大。
国内首款电机四足机器人案例分享
用户介绍
浙江大学控制科学与工程学院始于 1956 年,现有工业控制研究所、自动化仪表研究所、智能系统与控制研究所,工业控制技术国家重点实验室,工业自动化国家工程研究中心,自动化实验教学中心和分析仪器研究中心。教师中有中国工程院院士 1 人,长江特聘教授 2 人,求是特聘教授 2 人,国家“千人计划”3 人,国家“青年千人计划”入选者 1 人,教师中教授 29 人,副教授 30 人,具有博士学位的教师比例为 79.26%。主要研究项目包括复杂工程系统建模、控制与优化,过程系统工程,计算智能与智能决策,企业综合自动化系统,机器人导航与控制等机器人学科,在复杂工业过程与全新一代嵌入式主控系统设计。控制学院的科研文化根基穏固,以应用为本,积极支持教学人员进行具影响力、富实用价值的研究,多年来坚持以国家重大需求为出发点,始终坚持基础理论与应用研究结合,近年来承担了众多国家级科研项目,科技成果为国内领先,部分达到国际先进水平。

朱秋国老师团队从 2008 年开始,重点关注仿人机器人感知控制高性能单元与系统国家 863 重点课题攻关,以项目负责人的身份参与了平面单腿机器人平衡跳跃研究,腿式机器人动态平衡跳跃机理研究,多自由度仿人臂机器人系统开发,基于变刚度关节的仿生单腿机器人动态平衡控制与优化等相关项目,在国内足式机器人研究领域具有深厚的积累。
去往前人未至之境 – “赤兔”
浙江大学研制的“赤兔”四足机器人致力于打造四足机器人科研和教学的通用化平台,为广大机器人学者和爱好者提供高性价比的机器人开发平台。该平台具备了基本的运动功能,通过为开发者提供二次开发接口,开发者只需自己编写程序即可体验运动控制所带来的独特魅力。这种方式极大地减轻了研究者在工程量上的时间投入,使得大家可以集中精力研究机器人的运动控制、以及智能感知与控制等算法上,更快地推动和促进机器人技术的快速发展。
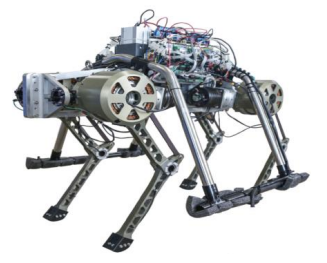
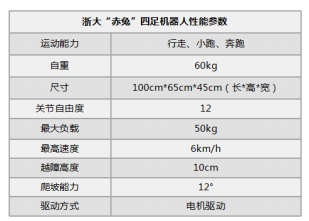
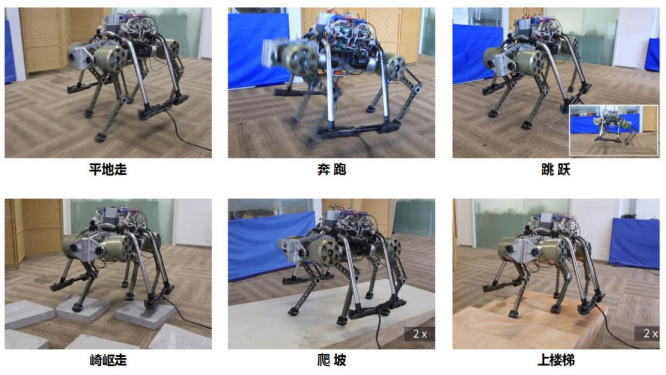
四足机器人作为腿足机器人的主要形式之一,其依靠腿足运动能够应对非结构化环境,在复杂地形适应性上具有显著的优势。赤兔是面向复杂路面环境下作业的电机驱动四足机器人,可以完成行走、对角小跑和奔跑 3 种步态,并可以通过台阶、斜坡和砖石等各种未知复杂路面。基于 Compact RIO 强大的数据运算能力,“赤兔”具备了适应复杂环境的高度适应能力,下表是四足机器人的基本性能参数。
项目提出了一种面向未知复杂地形的四足机器人运动规划方法。该方法基于零力矩点(Zero Moment Point, ZMP)稳定性判据进行实时轨迹规划,通过摆动腿的落地规划和策略感知未知地形的信息,实时调整各支撑腿长度以控制机器人躯体位姿与地形参数相匹配,实现机器人对未知地形高度与坡度的自适应。通过一种竖直虚拟弹簧的控制方法,基于设计机器人对地面的作用力轮廓,实现了机器人的的跳跃运动。同时,引入了相位计算与相位反馈,用于修正机器人运动过程中的节律偏移。
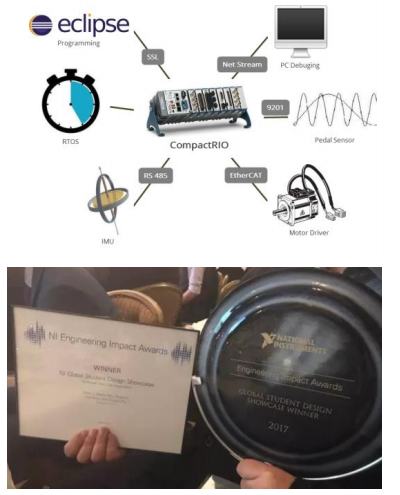
快速原型化系统控制平台 Compact RIO基于 CompactRIO-9033 主控制器,项目搭建了四足机器人系统。CompactRIO-9033 主控制器通过EtherCAT 接口与 12 个关节驱动器进行通讯,获得各关节的运动信息,并发送指令控制每个关节的运动;通过RS485 接口获得 IMU 测得的机器人姿态和运动信息;通过 NI 9201 数据采集卡获得足底的压力信息;通过无线网卡建立与上位机的数据流通讯,便于对部分关键数据的记录和实时观测;通过CompactRIO-9033 的 RTOS 对控制系统进行精确定时。在 2017 年全球工程设计大赛中,浙江大学朱秋国老师和熊蓉教授率领他们的团队拿下这座在全球学生设计评选中最具含金量的桂冠,2017 Student Design Competition全球冠军。
18928764315
